Robotic microscopy for everyone with the Web of Things: the OpenFlexure Microscope
- Abstract number
- 133
- Presentation Form
- Poster
- DOI
- 10.22443/rms.mmc2021.133
- Corresponding Email
- [email protected]
- Session
- Poster Session 1
- Authors
- Dr Richard Bowman (6), Dr Joel Collins (6), Dr Samuel McDermott (5), Mr Joe Knapper (6), Mr Boyko Vodenicharski (5), Mr Filip Ayazi (5), Mr Kaspar Bumke (6), Dr Benedict Diederich (3, 7), Dr Wei Ouyang (4), Mr Joram Mduda (2), Ms Valeriana Mayagaya (2), Mr Paul Nyakyi (1), Ms Grace Mwakajinga (1), Prof. William Wadsworth (6), Mr Valerian Sanga (1), Dr Julian Stirling (6), Dr Catherine Mkindi (2), Prof. Pietro Cicuta (5)
- Affiliations
-
1. Bongo Tech & Research
2. Ifakara Health Institute
3. Leibniz Institute of Photonic Technology
4. Science for Life Laboratory, School of Engineering Sciences in Chemistry, Biotechnology and Health, KTH - Royal Institute of Technology
5. University of Cambridge
6. Unviersity of Bath
7. Institute of Physical Chemistry and Abbe Center of Photonics, Friedrich-Schiller-University
- Keywords
Open source
Open source hardware
Web of Things
Automation
Repeatability
- Abstract text
The OpenFlexure Microscope is an open source project that includes hardware and software designs for a well-tested motorised microscope. Its growing community has built hundreds of microscopes around the world, for applications ranging from prototype diagnostic devices to educational projects. Microscopes have been in service for over a year without failure, and we have refined the design extensively to improve reliability in both assembly and use. Particular attention has been paid to replicability of both the hardware and the software, and to the prospect of integrating it with other projects in the open microscopy community.
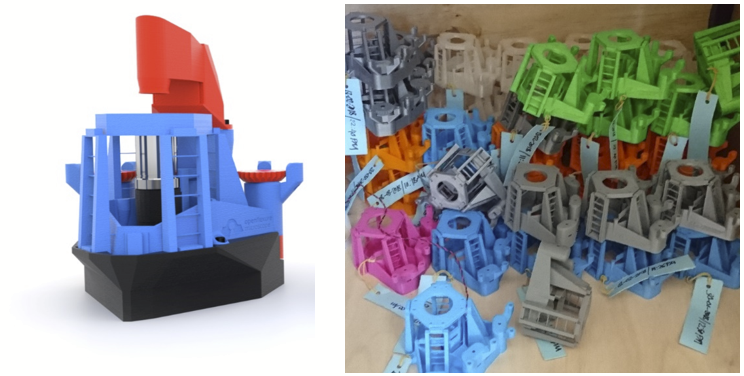
Figure 1: (left) A rendering of an assembled OpenFlexure Microscope (right) a collection of microscope bodies printed as part of our manufacture and testing at STICLab, TanzaniaThe high resolution version of the OpenFlexure Microscope, intended for laboratory use, comprises a motorised XY stage and motorised focus, a Raspberry Pi camera module, and an optics module based around an RMS-threaded microscope objective. A tube length correction lens reduces the optical magnification to better match the small size of the Sony IMX219 image sensor, and we take advantage of the tight integration of the Raspbery Pi camera module into the GPU firmware to enable real-time video streaming, fast autofocus, and on-the-fly flat field correction. This version of the microscope is currently in use in Tanzania, where we are evaluating it for malaria diagnosis.
The OpenFlexure Microscope occupies approximately 150x150x250mm of space, and costs around £200 in parts for the motorised, high resolution version. This not only makes it extremely accessible and convenient for parallel experiments, but it vastly improves replicability. Lowering the barrier to reproducing experiments will enable techniques to diffuse more rapidly between labs, as well as the obvious educational and development opportunities it creates.
Our hardware design has now been asembled many times by the core development team, our network of collaborators, and the wider community, including many builders with whom we have had no prior contact. Our assembly instructions have been refined many times, and we now make use of modern “DevOps” platforms to automatically build printable models and compile our instructions efficiently. Several variants of the microscope have been developed to enable alternative imaging modes including fluorescence, dark field and digital differential phase contrast, some of which have been integrated into the main project. More modular optics are possible using the connection to the UC2 system, which integrates our well-tested optomechanical design with a modular optics system that enables rapid reconfigurability and a variety of imaging modes.
Our software architecture is split into a server, handling the core logic and hardware control, and several client applications providing graphical and programming interfaces. The server and client communicate using an application programming interface (API) that is compliant with the W3C “Web of Things” standard, and uses hypertext transfer protocol (HTTP). This solves a longstanding problem in open instrumentation control software: how to develop interoperable instruments without forcing a particular framework or programming language on anyone using it. This approach means that a graphical control interface, a Python module, a MATLAB module, and a web-based debug interface can be used simultaneously, with minimal duplicated code: HTTP requests are part of the standard library for most high-level languages. The underlying architecture has been separated into its own project, LabThings, and we are working towards interoperability with other open microscopy projects such as uManager and ImJoy.
As we have now deployed microscopes in local clinics in Tanzania, our software includes a dedicated interface to enable patient slides to be scanned in accordance with the study protocol. Splitting the software into a core server component and a number of different clients with different interfaces has been invaluable as we support a community of users with very different levels of computer experience.
Figure 2: (left) A pane from the OpenFlexure Microscope interface, (right) a composite image of a blood smear, with a single image shown in the inset, reproduced from [1] under CC-BY-4.0.The core OpenFlexure Microscope project now represents a well tested, fully open design for an automated microscope capable of slide scanning at high resolution (including oil-immersion objectives) and suitable for lengthy unattended experiments. There are rich prospects for its use in smart microscopy experiments, both as a way to provide easily-replicated implementations of new techniques, and as a low cost platform for parallel experiments.
- References
Collins J et al. 2020 Robotic microscopy for everyone: the OpenFlexure microscope Biomedical Optics Express 11 2447-60
- Collins J, Knapper J, Stirling J, McDermott S, Ayazi F and Bowman, R 2021 Modern Microscopy with the Web of Things: The OpenFlexureMicroscope Software Stack preprint: https://arxiv.org/pdf/2101.00933.pdf
- Diederich et al. 2020 A versatile and customizable low-cost 3D-printed open standard for microscopic imaging Nature Communications 11 5979
- Ouyang W et al. 2019 ImJoy: an open-source computational platform for the deep learning era Nat Methods 16, 1199-200
- Edelstein A, Tsuchida M, Amodaj N, Pinkard H, Vale RD and Stuurman N 2014, Advanced methods of microscope control using μManager software. Journal of Biological Methods 1(2):e11
- Bowman R, Vodenicharski B, Collins J and Stirling J 2020 Flat-Field and Colour Correction for the Raspberry Pi Camera Module Journal of Open Hardware 4 1
- OpenFlexure project website https://openflexure.org/
- All relevant source code and design files are available at https://gitlab.com/openflexure/